A meticulous and enjoyable explanation, assembly and running of the system by [youtuuba]. There isn’t much detail missed. Thanks P. for making this documentary and sharing your thoughts!
Duration: 1h17m
TTL microcomputer
A meticulous and enjoyable explanation, assembly and running of the system by [youtuuba]. There isn’t much detail missed. Thanks P. for making this documentary and sharing your thoughts!
Duration: 1h17m
Before refurbishing his cat house, the 8-Bit Guy made time to do an episode on our kit. Needless to say this we think this is his best episode ever 🙂 . Approaching 300,000 views so far, but 100 of these must be our own reloads. Thank you David and we’ll get you an updated Snake later that doesn’t require color vision.
Duration: 12m15s
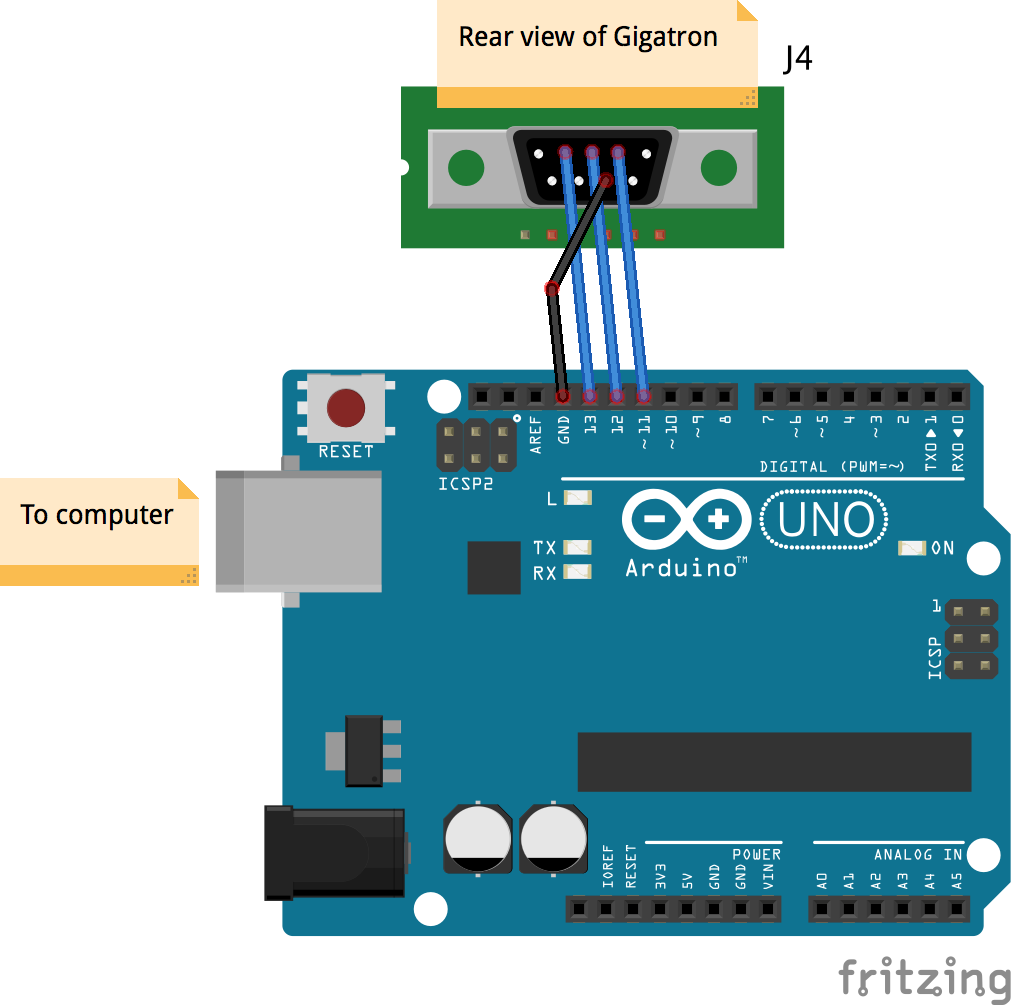
The video shows how an Arduino can be hooked up and pretend to be an ASCII keyboard. No EPROM change is needed. After powering the Arduino, it takes over control by resetting the Gigatron, navigating the menu and starting Loader. It fakes game controller signals to do that. Then it pushes a tiny precompiled Terminal program into the RAM. From there on, it sends simple ASCII codes which the board dutifully displays. This is step 1 towards interacting with the system for direct hacking.
The source code for the sketch is in GitHub. Hookup is with 4 male-to-female jumper wires, as explained on the Tutorials page.
Edit: The Arduino in turn can interface with a keyboard. Here an example with a PS/2 keyboard, using a standard library to handle the protocol.
The Arduino is a bit of an overkill here. A simple ATtiny85 will do the job just as well.

Double good news today. The first good news is that we will be speaking about Gigatron at the upcoming Hackaday conference on May 26 in Belgrade. We’re super excited that our talk was accepted, and hopefully this event is a chance to meet with many of you. The second and even greater news is that our supplier has sorted out their delivery issue. We reported about that hiccup earlier this month. This means that now we’ve all parts in-house for a first batch of kits. Gigatron is ready to ship, and we’re open to take orders!

Ordering details under “Get One!”
With ROM v1 done and arrival of the last kit parts confirmed for this week (yeah), now is the time for chores. The syntax I used for writing the apps has some rough ends. It was grown bottom-up, hand in hand with the GCL-to-vCPU compiler, while vCPU was still evolving. As I’ll need a new compiler for the Arduino interface anyway, why not fix what can be fixed? So now here is a formal EBNF definition of the updated notation, or call it a language if you wish.
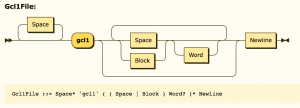
There is a great online visualizer that turns these grammars into easy-to-understand railroad diagrams. I’ve always liked these since studying the “Pascal User Manual and Report” in my first year at college. A webpage with all diagrams sits here on HaD.
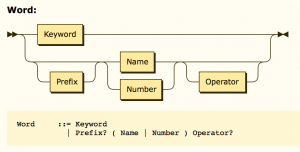
GCL will never look pretty, but it at least it isn’t Perl.
With great anticipation we received our last parts for the batch last week. Panic ensued when we discovered they were of the wrong type. Not a few, all of them… Did we place a wrong order? Frantic discussions with the supplier followed and yesterday it became clear: they messed up, apologised, and they are now sending us a new batch. We expect the total impact will be a two-week delay. Bummer, but at least we didn’t lose any money on a stupid mistake.
So please bear with us a little bit longer, soon you will be heating up your soldering iron!
After 360 commits my coding frenzy has reached a conclusion: ROM v1 is feature complete! The kit will ship not with one but two fast paced games: Snake and Racer. Sound improved and the serial loader is reliable, which is great for hacking and making more games. The fractal program now doubles as a clock, to give a valid excuse for keeping a unit on permanent display in the living room.

The unused ROM space is filled with three classic hires images from my previous projects. By packing 4 pixels in 3 bytes I got three images in where the ROM otherwise would only have space left for two.
This doesn’t mean the to do list is empty, far from that: “make todo” lists 90 ideas I apparently still have in mind. But after 6 months of breadboard prototyping, 3 months of PCB design and 4 months of software hacking, this is a good point to shift focus again. For example, towards demonstrations, tutorials and documentation. Keep you posted.
– Marcel


Lots has happened. Yesterday evening, the software has reached the alfa testing stage. You can find the source in Github. (You can use the visualizer that Martin Sedlák made to run it on your PC while you are waiting for your own Gigatron.)
The assembly videos are now available on YouTube. It is a series, in which I go through all the steps to build a Gigatron. These steps are also explained in detail in the assembly manual that comes with the kit.
At the Hacker Hotel conference, I talked about the Gigatron and people were excited about it! We are excited too, as we are reaching the point where we can actually sell a batch of Gigatron kits. If you want to be informed, subscribe to our mailing list.
– Walter
While Marcel is busy with the software, meanwhile I am working on over an hour of video footage on how to build the Gigatron. Actually, the 48-page assembly manual that is supplied with the kit already contains all that is needed to understand the electronic components and how to place them, how to solder and how to test the Gigatron during the build process, but we like to make this system as easy as possible to build.

– Walter
The software to be included with the kit release later this month is nearly done. Just in time as we’re now also waiting for the last parts shipment to arrive, expected in two weeks. When those are good we know if we can meet our target selling price and will announce it to those interested on the mailing list. All other parts are in house already, manuals printed, packaging ready and beta tests successfully completed. Our living rooms look like a warehouse now.

Of course the kit will ship with some demo applications built-in. My focus is for a part still on those, but equally important is that the programming core is stable and tested. For me it is crucial that the memory map is well-defined and the 16-bit interpreter is fully tested and useful. After all, the vCPU opcodes are jump offsets, so it will be impossible to fix any of that later while maintaining compatibility as well. Last week I found I had some unused space in the interpreter code page, so I added some new bit-wise logic instructions and support stack variables. Surprisingly, none of the applications I wrote so far needed those.
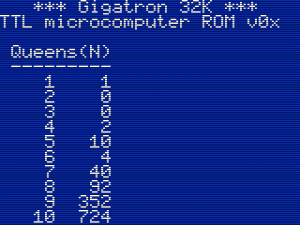
To test, I ported my old n-Queens solver. It exercises bitwise logic and recursion, so it is a good test for these new instructions. On the screenshot above you can see it gets the correct answers for the sequence. The solver uses 5 stack variables. That, plus one for the the return address, gives 12 bytes per invocation. With the stack living in the top half of the zero page, this means we can go 10 levels deep. The solver needs less than a minute to compute the list, or at about 850 recursions per second. [Edit: I just figured that it should be easy to go down to using 4 variables or 10 bytes, and with that up to 12 levels deep.]
Although 8-bit assembly programs must be programmed in the EPROM, interpreted programs run from RAM. The built-in applications are of course stored in ROM also, but they are loaded into RAM first, so they use the ROM merely as a disk. Interpreted programs can also be loaded into RAM directly over the input port, and this is how you can program the Gigatron without using an EPROM eraser and programmer. For this I hook up the input port pins, that normally go to the game controller, to a simple Arduino. The Arduino can send data at the same rate as the horizontal sync. With some checksumming overhead, this boils down to exactly 28k8 payload bits per second. Much faster than loading C64 programs from tape back in the day… (3000 baud with speed loaders!)
The loader was the last part of the software that needed debugging with a scope.
– Marcel
{kind=link}